")
সুচিপত্র:
- ধাপ 1: এটি কিভাবে কাজ করে
- পদক্ষেপ 2: শুরু করার আগে দয়া করে নোট করুন
- ধাপ 3: সমস্ত উপাদান সংগ্রহ করুন
- ধাপ 4: Variuos মাত্রা
- ধাপ 5: শরীর তৈরি করা
- ধাপ 6: Actuator সমাবেশ এবং প্লেট ফ্যাব্রিকেশন
- ধাপ 7: তরঙ্গ বৈশিষ্ট্য ম্যানুয়ালেশন
- ধাপ 8: ইলেকট্রনিক সংযোগ এবং প্রোগ্রাম
- ধাপ 9: মেনু চালিত প্রোগ্রাম দ্বারা অ্যাকচুয়েটর নিয়ন্ত্রণ
- ধাপ 10: ওয়েভ ট্যাঙ্ক কিভাবে পরিচালনা করবেন
- লেখক John Day day@howwhatproduce.com.
- Public 2024-01-30 08:01.
- সর্বশেষ পরিবর্তিত 2025-01-23 14:36.



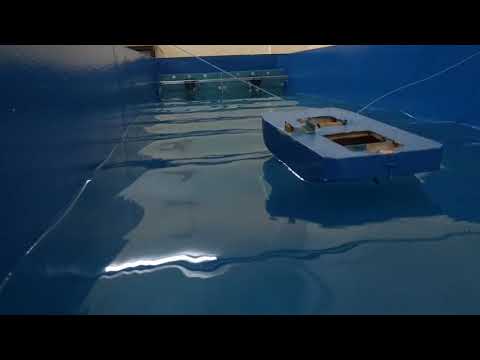
একটি তরঙ্গ ট্যাঙ্ক হল পৃষ্ঠ তরঙ্গের আচরণ পর্যবেক্ষণের জন্য একটি পরীক্ষাগার সেটআপ। সাধারণ তরঙ্গ ট্যাঙ্ক হল তরল, সাধারণত জল দিয়ে ভরা একটি বাক্স, উপরে খোলা বা বায়ু ভরা স্থান ছেড়ে। ট্যাঙ্কের এক প্রান্তে একটি অ্যাকচুয়েটর তরঙ্গ উৎপন্ন করে; অন্য প্রান্তে সাধারণত তরঙ্গ শোষণকারী পৃষ্ঠ থাকে।
সাধারনত এই ট্যাংকগুলির অনেক টাকা খরচ হয় তাই আমি তাদের প্রকল্পগুলির পরীক্ষার জন্য ট্যাঙ্ক ব্যবহার করতে চান এমন শিক্ষার্থীদের জন্য সত্যিই একটি সস্তা সমাধান করার চেষ্টা করেছি।
ধাপ 1: এটি কিভাবে কাজ করে
সুতরাং প্রকল্পটিতে ভি-স্লট অ্যালুমিনিয়াম এক্সট্রুশন ব্যবহার করে তৈরি দুটি অ্যাকচুয়েটর রয়েছে।
একটি স্টেপার মোটর প্রতিটি অ্যাকচুয়েটরের সাথে সংযুক্ত থাকে এবং উভয় মোটর একই স্টেপার মোটর ড্রাইভ দ্বারা নিয়ন্ত্রিত হয় যাতে কোন ল্যাগ থাকে না।
Arduino মোটর ড্রাইভারকে নিয়ন্ত্রণ করতে ব্যবহৃত হয়। একটি মেনু চালিত প্রোগ্রাম পিসি মাধ্যমে সংযুক্ত arduion ইনপুট দিতে ব্যবহৃত হয়। অ্যাকচুয়েটর প্লেটগুলি ভি-স্লট গ্যান্ট্রিতে মাউন্ট করা হয় যা মোটরগুলি শুরু হওয়ার পরে পিছনে যাবে এবং প্লেটের এই পিছনে এবং পিছনে চলাচল ট্যাঙ্কের ভিতরে তরঙ্গ তৈরি করে। arduino এর মাধ্যমে মোটর।
পদক্ষেপ 2: শুরু করার আগে দয়া করে নোট করুন

আমি এই টিউটোরিয়ালটিকে ছোট এবং সহজে বোঝার জন্য কিভাবে arduino ব্যবহার করতে হয় বা কিভাবে dingালাই করতে হয় তা ছোট ছোট জিনিসগুলির অধিকাংশই আবৃত করি নি। বেশিরভাগ অনুপস্থিত জিনিস ছবি এবং ভিডিওতে মুছে ফেলা হবে। প্রকল্পের বিষয়ে কোন সমস্যা বা প্রশ্ন থাকলে দয়া করে আমাকে মেসেজ করুন।
ধাপ 3: সমস্ত উপাদান সংগ্রহ করুন
- আরডুইনো মাইক্রো কন্টোলার
- 2*স্টেপার মোটর (মোটর প্রতি 2.8 কেজি সেমি টর্ক)
- 1*স্টেপার মোটর ড্রাইভার
- 2*ভি স্লট গ্যান্ট্রি সিস্টেম
- ট্যাংক শরীরের জন্য ইস্পাত বা লোহা প্লেট
- শরীরকে সমর্থন করার জন্য এল-স্টিফেনার
- অ্যাকচুয়েটর প্লেট তৈরি করতে ফাইবার বা প্লাস্টিকের শীট
- তারের 48 ভোল্ট ডিসি পাওয়ার সাপ্লাই
আমি ভি-স্লট গ্যান্ট্রির জন্য উপকরণ অন্তর্ভুক্ত করিনি কারণ তালিকাটি অনেক বড় হবে তারপর শুধু গুগল ভি-স্লট আপনি 2040 অ্যালুমিনিয়াম এক্সট্রুশন ব্যবহার করার জন্য এটি কিভাবে একত্রিত করবেন সে সম্পর্কে অনেক ভিডিও পাবেন। আপনি আরো লোড বহন করতে চাইলে মোটর ক্ষমতা এবং বিদ্যুৎ সরবরাহ ক্ষমতা পরিবর্তন হবে।
ট্যাঙ্কের মাত্রা
দৈর্ঘ্য 5.50 মি
প্রস্থ 1.07 মি
গভীরতা 0.50 মি
ধাপ 4: Variuos মাত্রা



জিনিসগুলিকে সহজ এবং টিউটোরিয়াল ছোট করার জন্য আমি একটি স্কেল সহ বিভিন্ন উপাদানের ছবি তুলেছি যাতে আপনি এর আকার দেখতে পারেন।
ধাপ 5: শরীর তৈরি করা




শরীর 3 মিমি পুরু castালাই লোহা শীট দ্বারা তৈরি করা হয়।
ট্যাঙ্কের প্রস্থ 1.10 মিটার, দৈর্ঘ্য 5 মিটার এবং উচ্চতা 0.5 মিটার।
যেখানেই প্রয়োজন সেখানে স্টিফেনার দিয়ে হালকা ইস্পাত দিয়ে ট্যাঙ্ক বডি তৈরি করা হয়। হালকা ইস্পাত প্লেটগুলি বাঁকানো হয়েছিল এবং ট্যাঙ্কের মাত্রা অনুসারে বিভিন্ন বিভাগে কাটা হয়েছিল। এই বিভাগগুলিকে একসঙ্গে welালাই করে তৈরি করা হয়েছিল। কাঠামো আরও শক্তিশালী করার জন্য স্টিফেনারগুলিও একসঙ্গে dedালাই করা হয়েছিল।
প্রথম প্লেটটি বিভিন্ন বিভাগে পছন্দসই আকারে বাঁকানো হয়েছিল এবং তারপরে এই বিভাগগুলি শরীরকে খাড়া করার জন্য একসঙ্গে dedালাই করা হয়েছিল। স্টিফেনার যোগ করা হয়েছে একটি সমর্থন স্টিফেনারের মাত্রা ছবিতে দেখানো হয়েছে
ধাপ 6: Actuator সমাবেশ এবং প্লেট ফ্যাব্রিকেশন



অ্যাকচুয়েটরগুলি ভি-স্লট সিস্টেম ব্যবহার করে তৈরি করা হয়। এগুলি সত্যিই সস্তা এবং সহজেই তৈরি করা যায় আপনি অনলাইনে গুগল করতে পারেন এইগুলির মধ্যে কীভাবে একত্রিত করা যায় আমি লোড বহন ক্ষমতা বাড়ানোর জন্য বেল্ট ড্রাইভের পরিবর্তে সীসা স্ক্রু ব্যবহার করেছি আমি অ্যাসেম্বলি টিউটোরিয়াল অন্তর্ভুক্ত করিনি কারণ এটি আপনার লোড অনুযায়ী পরিবর্তন হবে। আমার জন্য সর্বোচ্চ গতিতে লোড ছিল প্রায় 14 কেজি।
অ্যাকচুয়েটর প্লেটটি এফআরপি শীট ব্যবহার করে তৈরি করা হয়, এক্রাইলিকও ব্যবহার করা যেতে পারে।
প্যাডেল ফ্রেম
প্যাডেল ফ্রেমটি স্টেইনলেস স্টিলের তৈরি। স্টেইনলেস স্টিল জল প্রমাণ এবং এইভাবে জারা প্রতিরোধ করবে। প্যাডেল ফ্রেমের জন্য 2 x 2 সেমি বর্গক্ষেত্র ব্যবহার করা হয়েছিল। একটি বলিষ্ঠ ফ্রেম প্রয়োজন ছিল কারণ তরঙ্গ উৎপাদনের সময় প্যাডেলের উপর প্রচুর সাইক্লিক লোড কাজ করবে। ইস্পাত ফ্রেম বাঁকবে না এবং এভাবে নিয়মিত সাইনোসয়েডাল তরঙ্গ তৈরি করবে।
ভার্সলট সিস্টেমে গ্যান্ট্রি প্লেটের সাথে অ্যাকচুয়েটর প্লেটকে সংযুক্ত করার জন্য একটি কাস্টম এল-ক্ল্যাম্প তৈরি করা হয়েছিল।
ধাপ 7: তরঙ্গ বৈশিষ্ট্য ম্যানুয়ালেশন



ট্যাঙ্ক প্রয়োজন অনুযায়ী বিভিন্ন তরঙ্গ উচ্চতা উৎপন্ন করতে পারে। বিভিন্ন তরঙ্গ উচ্চতা উৎপন্ন করতে মোটরের RPM সমন্বয় করা হয়। বড় তরঙ্গের উচ্চতা পেতে মোটরের RPM বৃদ্ধি করা হয় এইভাবে তরঙ্গের তরঙ্গের দৈর্ঘ্য হ্রাস পায়। মোটরের তরঙ্গদৈর্ঘ্য RPM বাড়ানোর অনুরূপ হ্রাস পায়। মেনু থেকে কাস্টম RPM অপশন বেছে নিয়ে RPM সমন্বয় করা যায়।
সর্বোচ্চ RPM = 250
ন্যূনতম RPM = 50
অ্যাকসিলরোমিটার দ্বারা রেকর্ড করা বিভিন্ন তরঙ্গ উচ্চতার উদাহরণ নিচে দেওয়া হল। প্রথম চিত্র হল উচ্চ RPM এ রেকর্ড করা ডেটা ফলে আমরা উচ্চ তরঙ্গ উচ্চতা পাই। দ্বিতীয় চিত্রটি তরঙ্গের উচ্চতা হ্রাস এবং গ্রাফের বর্ধিত তরঙ্গদৈর্ঘ্য দেখায় যা অ্যাক্সিলারোমিটার দ্বারা রেকর্ড করা ডেটা এবং উত্পন্ন তরঙ্গের প্রকৃত তরঙ্গ বৈশিষ্ট্যগুলি উপস্থাপন করে।
ধাপ 8: ইলেকট্রনিক সংযোগ এবং প্রোগ্রাম

পাওয়ার সাপ্লাই সংযোগ করার সময় সাবধানতা অবলম্বন করুন পোলারিটি পজেটিভ টার্মিনালকে পজিটিভ এবং নেগেটিভ থেকে নেগেটিভে সংযুক্ত করুন। ছবিতে দেখানো মটর এবং ড্রাইভারের জন্য সংযোগ তৈরি করুন। একবার সব কানেকশন যথাযথভাবে সংযুক্ত হলে মাইক্রোকন্ট্রোলার পিন (8, 9, 10, এবং 11) স্টেপার মোটর চালকের কাছে। একটি ইউএসবি দ্বারা একটি পিসিতে মাইক্রোকন্ট্রোলার সংযুক্ত করুন। Arduino IDE> সিরিয়াল মনিটর শুরু করুন।
প্রোগ্রামটি টিউটোরিয়ালে অন্তর্ভুক্ত করা হয়েছে এবং এটি স্ব -ব্যাখ্যামূলক এটি সুইচ কেস ব্যবহার করে এবং যদি অন্য কোন স্টেটমেন্ট কাজ করে।
এখানে প্রোগ্রামটির গুগল ড্রাইভ লিঙ্ক রয়েছে
Arduino নিয়ন্ত্রণ প্রোগ্রাম
ধাপ 9: মেনু চালিত প্রোগ্রাম দ্বারা অ্যাকচুয়েটর নিয়ন্ত্রণ

একবার মাইক্রোকন্ট্রোলার পিসির সাথে সঠিকভাবে সংযুক্ত হয়ে গেলে আপনি অনুরূপ মেনু পাবেন। অপশনটি বেছে নিতে শুধু অপশনের পাশের নম্বর টাইপ করুন এবং এন্টার চাপুন
উদাহরণ:-
"সর্বোচ্চ ফ্রিকোয়েন্সিতে সক্রিয় করুন" নির্বাচন করতে 1 টাইপ করুন এবং এন্টার টিপুন।
ক্রিয়া বন্ধ করতে 0 টাইপ করুন এবং এন্টার টিপুন।
জরুরী বিরতি
অ্যাকচুয়েটর বন্ধ করতে শূন্য "0" টিপুন এবং প্রবেশ করুন।
জরুরী স্টপ করতে হয় মাইক্রোকন্ট্রোলারে রিসেট চাপুন অথবা বিদ্যুৎ সরবরাহ বন্ধ করে দিন।
ধাপ 10: ওয়েভ ট্যাঙ্ক কিভাবে পরিচালনা করবেন

এই ট্যাঙ্কটি আমার প্রধান প্রকল্পের অংশ হিসাবে তৈরি করা হয়েছিল। স্কেলযুক্ত বার্জ মডেলের জন্য মাথার সমুদ্র অবস্থায় বিভিন্ন নিয়মিত তরঙ্গ তৈরির জন্য ট্যাঙ্কটি পরীক্ষা করা হয়েছে। ওয়েভ ফ্লুমের পরীক্ষা সফল হয়েছে। এই প্রকল্পের উন্নয়নের জন্য সামগ্রিক খরচ ছিল.,০০০ টাকা। দুই মাসের মধ্যে 81, 000 (একাত্তর হাজার)।
কোন প্রশ্নের জন্য মন্তব্য করুন।

জল প্রতিযোগিতায় প্রথম পুরস্কার
প্রস্তাবিত:
আরডুইনো এবং পাইথনের আরডুইনো মাস্টার লাইব্রেরি ব্যবহার করে হালকা তীব্রতা প্লট করা: 5 টি ধাপ

আরডুইনো এবং পাইথনের আরডুইনো মাস্টার লাইব্রেরি ব্যবহার করে হালকা তীব্রতার প্লট করা: আরডুইনো একটি অর্থনৈতিক কিন্তু অত্যন্ত দক্ষ এবং কার্যকরী হাতিয়ার, এটিকে এমবেডেড সি -তে প্রোগ্রাম করা প্রকল্পগুলিকে ক্লান্তিকর করে তোলে! পাইথনের আরডুইনো_মাস্টার মডিউল এটিকে সহজ করে এবং আমাদের গণনা করতে দেয়, আবর্জনার মান অপসারণ করে
ESP32 ব্যবহার করে $ 30 এর নিচে একটি ট্যাঙ্ক ভলিউম রিডার তৈরি করুন: 5 টি ধাপ (ছবি সহ)
")
ESP32 ব্যবহার করে $০ ডলারের নিচে একটি ট্যাঙ্ক ভলিউম রিডার তৈরি করুন: ইন্টারনেট অফ থিংস অনেক কারুশিল্প প্রস্তুতকারক এবং মদ প্রস্তুতকারকদের বাড়িতে অনেক জটিল যন্ত্র প্রয়োগ করেছে। লেভেল সেন্সরযুক্ত অ্যাপ্লিকেশনগুলি কয়েক দশক ধরে বড় শোধনাগার, জল শোধনাগার এবং রাসায়নিকগুলিতে ব্যবহৃত হচ্ছে
ব্লুটুথ মডিউল এবং স্বায়ত্তশাসিত রোবট মুভমেন্ট ব্যবহার করে ভয়েস দ্বারা নিয়ন্ত্রিত দূরত্ব, দিকনির্দেশনা এবং আবর্তনের ডিগ্রী (পূর্ব, পশ্চিম, উত্তর, দক্ষিণ) সহ আরডুইনো রোবট: 6 ধাপ
 সহ আরডুইনো রোবট: 6 ধাপ")
ব্লুটুথ মডিউল এবং স্বায়ত্তশাসিত রোবট মুভমেন্ট ব্যবহার করে ভয়েস দ্বারা নিয়ন্ত্রিত দূরত্ব, দিক এবং আবর্তনের ডিগ্রী (পূর্ব, পশ্চিম, উত্তর, দক্ষিণ) সহ আরডুইনো রোবট। , বাম, ডান, পূর্ব, পশ্চিম, উত্তর, দক্ষিণ) ভয়েস কমান্ড ব্যবহার করে সেন্টিমিটারে দূরত্ব প্রয়োজন। রোবটকে স্বয়ংক্রিয়ভাবেও সরানো যায়
কোডিং এবং অ্যান্ড্রয়েড অ্যাপ সহ ইউএনও আর 3, এইচসি -05 এবং এল 293 ডি মোটরশিল্ড ব্যবহার করে আরডুইনো 4 হুইল ড্রাইভ ব্লুটুথ আরসি কার: 8 টি ধাপ

কোডিং এবং অ্যান্ড্রয়েড অ্যাপ দিয়ে UNO R3, HC-05 এবং L293D মোটরশিল্ড ব্যবহার করে Arduino 4 হুইল ড্রাইভ ব্লুটুথ আরসি কার: আজ আমি আপনাকে HC 05, L293 মোটর শিল্ড ব্যবহার করে কিভাবে একটি arduino 4 চাকা ড্রাইভ ব্লুটুথ আরসি কার তৈরি করতে হয় সে সম্পর্কে বলব, 4 ডিসি মোটর, কোডিং এবং অ্যাপের সাথে অ্যান্ড্রয়েড গাড়ি নিয়ন্ত্রণ করার জন্য ব্যবহৃত উপাদান।
ওয়াইফাই এবং আইআর রিমোট এবং অ্যান্ড্রয়েড অ্যাপ ব্যবহার করে নোডএমসিইউ এবং আইআর রিসিভারের সাথে রিলে কন্ট্রোল: 5 টি ধাপ (ছবি সহ)
")
ওয়াইফাই এবং আইআর রিমোট এবং অ্যান্ড্রয়েড অ্যাপ ব্যবহার করে নোডএমসিইউ এবং আইআর রিসিভারের সাথে 8 রিলে কন্ট্রোল: ওয়াইফাই এবং আইআর রিমোট এবং অ্যান্ড্রয়েড অ্যাপের মাধ্যমে নোডেমকু এবং আইআর রিসিভার ব্যবহার করে 8 রিলে সুইচ নিয়ন্ত্রণ করুন। এখানে