: 8 টি ধাপ (ছবি সহ)")
সুচিপত্র:
- লেখক John Day day@howwhatproduce.com.
- Public 2024-01-30 08:02.
- সর্বশেষ পরিবর্তিত 2025-01-23 14:36.


সবাইকে অভিবাদন, এটি সফলভাবে সম্পন্ন করার পরে একটি সাধারণ XY প্লটার করার মাধ্যমে শুরু হয়েছিল, আমি ব্রেইল টেক্সট কনভার্টারে একটি সহজ বক্তৃতা তৈরি করার কথা ভাবলাম। আমি এটি অনলাইনে অনুসন্ধান শুরু করেছিলাম এবং অপ্রত্যাশিতভাবে দামগুলি খুব বেশি ছিল, যা আমাকে একটি ছোট পোর্টেবল এবং সস্তা লেখক তৈরি করে।
যেহেতু আমরা জানি যে আমরা যা কিছু নির্মাণ করতে ভাবি, তা বিদ্যমান বা কমপক্ষে কারো দ্বারা চেষ্টা করা হতে পারে, তাই আমি এই ধরনের লেখার মেশিন খুঁজতে শুরু করলাম। যা ছোট পোর্টেবল এবং ব্যবহার করা সহজ।
সত্যি বলছি আমি আরডুইনোতে নতুন এবং এখনও শিখছি। আমি সফলভাবে একটি XY প্লটার তৈরি করতে সক্ষম হয়েছি যাতে আমার জ্ঞান একই জ্ঞানের সাথে উচ্চতর ছিল আমি আমার নিজের ছোট ব্রেইল লেখককে বের করতে পারতাম তাই এই প্রক্রিয়ায় আমি শিখেছি অনেক এবং আমি অবশেষে মাত্র 2 সপ্তাহের মধ্যে এটি বিকাশ করতে সক্ষম হয়েছি।
সুতরাং এখানে কিভাবে একটি সাধারণ ব্রেইল লেখক তৈরি করা যায়।
ধাপ 1: প্রকল্পের জন্য উপকরণ
- আরডুইনো ন্যানো
- A4988 স্টেপার ড্রাইভার
- ব্লুটুথ সিরিয়াল ট্রান্সসিভার মডিউল
- সিডি ড্রাইভ স্টেপার মোটর স্লাইডার লিনিয়ার গাইড মাইক্রো
- 2 টুকরা 360-ডিগ্রী ঘূর্ণন servo মোটর
- 1 টুকরা 180-ডিগ্রী servo মোটর
- 2 টুকরা ইনজেকশন সিরিঞ্জ (মেডিসিন দোকানে)
- পরিষ্কার এক্রাইলিক শীট 1 টুকরা
- ডবল পার্শ্বযুক্ত ফোম টেপ
- ফেভি কুইক
- পুরুষ-মহিলা জাম্পার তার
- কাটিং টুলস এবং স্ক্রু ড্রাইভার সেট।
- জেল / বল পেন
- ব্লুটুথ ফিচার সহ মোবাইল ফোন
- অ্যাপ: আরডুইনো ভয়েস কন্ট্রোল
এখন আসুন আমরা এটি তৈরি করি
-
মোট প্রকল্পকে 4 টি ছোট ভাগে ভাগ করা যায়
- লাইনার মডিউল সেটআপ (A4988 ড্রাইভার ব্যবহার করে)
- লেখকের মাথার জন্য আপ এবং ডাউন মোশন তৈরি করা
- কাগজ lingালাই জন্য বেলন
- ব্লুটুথ ইন্টিগ্রেশন
- শেষে সমস্ত অংশগুলিকে একত্রিত করতে হবে যা প্রকল্পটি সম্পন্ন করবে।
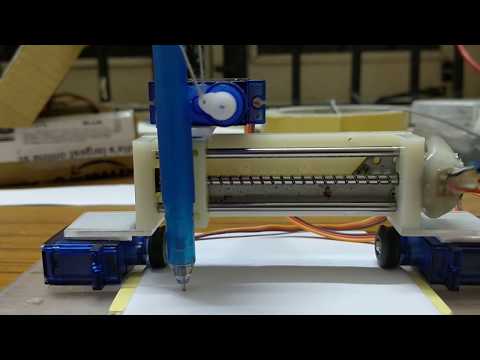
ধাপ 2: পর্ব 1: লেখকের জন্য লাইনার মোশন তৈরি করা

কাগজে স্টাফ লেখার জন্য আমাদের গতিশীলতা প্রয়োজন। বিভিন্ন পদ্ধতি ব্যবহার করে এই ধরনের যান্ত্রিক গতি তৈরির জন্য প্রচুর ভিডিও রয়েছে। কিন্তু স্টেপার মোটর ব্যবহার করে আমরা উচ্চ নির্ভুলতার সাথে এটি খুব সহজেই করতে পারি।
তাই যান্ত্রিক জিনিস তৈরির এড়ানোর জন্য আমি স্টিপার মোটর ব্যবহার করেছি যা একটি স্লাইডারের সাথে আসছে, আপনি এটি আপনার নিজের তৈরি করতে পারেন, যদি আপনি নিজের তৈরি করতে আগ্রহী হন তবে আপনি এই লিঙ্কটি অনুসরণ করতে পারেন।
যান্ত্রিক অংশ হয়ে গেলে আমাদের বৈদ্যুতিক কনফিগারেশন করার ধাপগুলি অনুসরণ করতে হবে
- ছবিটি সার্কিট কনফিগারেশন অনুসরণ করুন।
-
লাগাতে ভুলবেন না
- পিন 6: সক্ষম করুন
- পিন 5: ধাপ
- পিন 4: দিকনির্দেশ
- আপনার Arduino ন্যানোতে BasicMove2 এর কোড আপলোড করুন এবং সিরিয়াল মনিটরটি খুলুন এবং "f" ফরওয়ার্ড করার জন্য এবং "" b "ব্যাকওয়ার্ড ব্যবহার করুন এবং আপনার সার্কিট পরীক্ষা করুন। চেক করুন আপনি সঠিক রৈখিক গতি অর্জন করতে পারছেন নাকি নির্ভুলতার সাথে।
- আপনি কমান্ডের মতো fbfbffbbfffbbb সিরিজ ব্যবহার করতে পারেন।
ধাপ 3: পার্ট 2: রাইটার হেড (আপ এবং ডাউন মোশন)
")
")
")
")
আপ এবং ডাউন মোশন করার বিভিন্ন উপায় আছে। আপনি একটি সোলেনয়েড অ্যাকচুয়েটর ব্যবহার করে এটি করতে পারেন। কিন্তু এখানে আমি একটি সার্ভো মোটরের সাহায্যে একটি সাধারণ কলম ব্যবহার করছি।
- অপসারণযোগ্য রিফিল সহ যে কোনও সাধারণ বল পেন নিন।
- ভিতরে রিফিল ঠেলে উপরের দিকে একটি গর্ত তৈরি করুন, নিশ্চিত করুন যে আপনার গর্তটি কলমের উভয় পাশ দিয়ে যেতে হবে এবং রিফিল করতে হবে।
- রিফিলের মধ্যে আরেকটি গর্ত তৈরি করুন এবং তার সাথে একটি স্ট্রিং সংযুক্ত করুন।
- রিফিলটি পিছনে রাখুন, এবং রিফাইলের গর্তের নীচে কলমে একটি গর্ত তৈরি করুন এটি রিফাইলের চেয়ে কমপক্ষে 2-3 সেমি কম করতে ভুলবেন না।
- এখন কলমের মাধ্যমে একটি ইলাস্টিক রাবার বেঁধে নিন এবং রিফাইল করুন।
- 180 ডিগ্রী সার্ভো মোটর ব্যবহার করুন, এবং এটি 0 ডিগ্রীতে সেট করুন এবং স্ট্রিংটিকে নোবে সংযুক্ত করুন।
- এখন যখন নবটি ঘড়ির কাঁটার বিপরীতে 180 ঘূর্ণন করে, তখন রিফিলটি টেনে বের করা হবে এবং যখন এটি 0 ডিগ্রিতে ফিরে যাবে কারণ উপরের ইলাস্টিক ব্যান্ডের কারণে এটি আবার ভিতরে চলে যাবে।
- Arduino ন্যানোতে 8 নম্বর পিন করতে সিগন্যাল পিন সংযুক্ত করুন।
- আপনার Arduino ন্যানোতে basicMove2 এর কোড আপলোড করুন এবং সিরিয়াল মনিটর খুলুন এবং "n" ব্যবহার করুন এবং আপনার সার্কিট পরীক্ষা করুন।
- আপনি nnnnnnnnn কমান্ডের সিরিজও ব্যবহার করতে পারেন এবং এটি কাজ করছে কিনা তা পরীক্ষা করে দেখুন।
- ইচ্ছা গতি পেতে ঘূর্ণন কোণ হ্রাস করুন।
ধাপ 4: পার্ট 3: পেপার রোলার



এখন পেপার রোলার, এটি সবচেয়ে আকর্ষণীয় এবং চ্যালেঞ্জিং অংশ।
- ইনজেকশন সিরিঞ্জ রাবার সরান।
- বৃত্তাকার প্লাস্টিকের গিয়ার কাটা।
- এটি রাবারে রাখুন এবং কিছু আঠালো লাগান।
- এটি সার্ভো সংযুক্ত করুন এবং এটি আঠালো দিয়ে সুরক্ষিত করুন।
- উপরের মত আরেকটি তৈরি করুন।
- Arduino ন্যানোতে 9 এবং 10 নম্বর পিনের সংকেত পিন সংযুক্ত করুন।
- আপনার Arduino ন্যানোতে basicMove2 এর কোড আপলোড করুন এবং সিরিয়াল মনিটর খুলুন এবং "p" ব্যবহার করুন এবং আপনার সার্কিট পরীক্ষা করুন।
- আপনি pppppppppp কমান্ডের সিরিজও ব্যবহার করতে পারেন এবং এটি কাজ করছে কিনা তা পরীক্ষা করে দেখুন।
- কাঙ্ক্ষিত গতি পেতে হ্রাস ঘূর্ণন কোণ বৃদ্ধি করুন।
- সার্ভোর ভিতরে উপস্থিত পোটেন্টিওমিটার পরিবর্তন করে গতি সামঞ্জস্য করার চেষ্টা করুন।
- একই দিক এবং গতিতে ঘূর্ণন করুন (এটি সবচেয়ে গুরুত্বপূর্ণ এবং ক্লান্তিকর কাজ)।
ধাপ 5: পার্ট 4: ব্লুটুথ মডিউল ইন্টিগ্রেশন

এই অংশটি সবচেয়ে সহজ অংশ।
- উপরের সার্কিট কনফিগারেশনটি করুন এবং এটি সম্পন্ন হয়েছে।
- এটি আপনাকে Arduino ভয়েস কন্ট্রোল ব্যবহার করে ভয়েস কমান্ড পাঠাতে সাহায্য করবে।
- আপনি গুগলে "Arduino Bluetooth module hc-05" সার্চ করতে পারেন আপনি চমৎকার উদাহরণ পাবেন।
ধাপ 6: অংশ 5: সমস্ত একত্রিত করুন



এখন আমাদের চারটি অংশ একত্রিত করা যাক।
- চাদর পরিষ্কার করুন।
- ডাবল টেপ ব্যবহার করে, ছবিতে দেখানো সার্ভোস মোটর যোগ করুন।
- রৈখিক স্লাইডারে অতিরিক্ত প্লাস্টিকের টুকরো সংযুক্ত করুন এবং এটি দুটি সার্ভের উপরে রাখুন।
- কাগজের রোলারের সাথে এটিকে সমান্তরাল করতে ভুলবেন না।
- এখন কলম মাথা সংযুক্ত করুন, নিশ্চিত করুন যে এটি পৃষ্ঠ স্পর্শ করা উচিত নয় এবং servo ঘূর্ণন এটি টেপ একটি ছিদ্র খোঁচা উচিত।
- পিন Arduino ন্যানো সংযুক্ত করুন।
- আপনার Arduino ন্যানোতে basicMove2 এর কোড আপলোড করুন।
-
সিরিয়াল মনিটর খুলুন এবং সমস্ত কমান্ড চেক করুন
- ফরওয়ার্ড করার জন্য
- পিছনের জন্য খ
- পেপার রোলিংয়ের জন্য পি
- n কলম উপরে এবং নিচে সরানোর জন্য।
- একবার সমস্ত ফাংশন যাচাই হয়ে গেলে এটি ব্রেইল মুদ্রণের জন্য প্রস্তুত।
ধাপ 7: সার্কিট কম্প্যাক্ট করুন




একটি ছোট এবং একক রুটিবোর্ডে সার্কিট তৈরি করতে ছবিটি প্রবাহিত করুন।
ধাপ 8: ব্রেইল মুদ্রণ করা যাক

- Brallie.ino ফাইলটি খুলুন, Arduino IDE এর সিরিয়াল মনিটর খুলুন।
- রোলিং পেপার মোটরের নিচে কাগজ রাখুন।
- কমান্ডে কিছু স্থান অর্থাৎ ("") পাঠান এবং এন্টার ক্লিক করুন।
- কাগজ ভিতরে স্লাইড হবে।
- লেখকের মাথা অতিক্রম না করা পর্যন্ত এটি করুন।
- তারপর আপনি মনিটরে আপনার কমান্ড পাঠাতে পারেন, প্রকৃত পাঠ্য।
- আপনার ব্লুটুথ অ্যাপটি খুলুন এবং ব্লুটুথের সাথে সংযোগ করুন এবং ভয়েস কমান্ড পাঠান।
- ব্রেইল ভাষা দেখতে কাগজ উল্টে দিন।
- আমি হাই, হ্যালো এবং স্বাগত মত কিছু শব্দ চেষ্টা করেছি আপনি নমুনা আউটপুট কাগজ দেখতে পারেন।
-
আপনার জন্য নির্দিষ্ট ফলাফল পেতে আপনি কোডের নীচের পরামিতিগুলি পরিবর্তন করতে পারেন।
- ব্রেইল কলামের মধ্যে ফাঁক: int ধাপ = 30;
- ব্রেইলের প্রথম দুটি বিন্দুর পরের দুটি বিন্দুর সারির মধ্যে লাইন ফাঁক: int paperLine = 250;
- রৈখিক স্লাইডারের গতি: int stepperDelay = 500;
- লেখকের মাথার গতি: int servodelay = 500;
- প্রতি লাইন অক্ষরের সংখ্যা: int n = 10;
প্রস্তাবিত:
স্ক্যানআপ এনএফসি রিডার/লেখক এবং অন্ধ, দৃষ্টি প্রতিবন্ধী এবং অন্য সকলের জন্য অডিও রেকর্ডার: 4 টি ধাপ (ছবি সহ)
")
স্ক্যানআপ এনএফসি রিডার/লেখক এবং অন্ধ, দৃষ্টি প্রতিবন্ধী এবং অন্য সকলের জন্য অডিও রেকর্ডার: আমি শিল্প নকশা অধ্যয়ন করি এবং প্রকল্পটি আমার সেমিস্টারের কাজ। লক্ষ্য হল দৃষ্টি প্রতিবন্ধী এবং অন্ধদেরকে একটি যন্ত্র দিয়ে সমর্থন করা, যা একটি SD কার্ডে WAV ফরম্যাটে অডিও রেকর্ড করতে এবং সেই তথ্যকে একটি NFC ট্যাগ দ্বারা কল করতে দেয়। তাই মধ্যে
বক্তৃতা থেকে বক্তৃতা একটি ARMbasic চালিত UChip, এবং অন্যান্য ARMbasic চালিত SBCs: 3 ধাপে ক্লিক করুন

বক্তৃতা থেকে বক্তৃতা একটি ARMbasic চালিত UChip, এবং অন্যান্য ARMbasic চালিত SBCs: ভূমিকা: শুভ দিন। আমার নাম টড। আমি একজন মহাকাশ ও প্রতিরক্ষা পেশাজীবী যে হৃদয়েও একটু ভ্রুক্ষেপ করে।
ব্রেইল এবং অডিও থেকে পাঠ্য: 7 টি ধাপ

টেক্সট টু ব্রেইল এবং অডিও: এই প্রকল্পটি আমি এবং আমার বন্ধু আকিভা ব্রুকলার আমাদের ইঞ্জিনিয়ারিং ক্লাসের স্কুল প্রকল্প হিসেবে তৈরি করেছি। এর পিছনে ধারণাটি ছিল অন্ধদের জন্য একটি উপায় তৈরি করা যারা শুধুমাত্র ব্রেইলে পড়তে পারে যাতে তারা তাদের কম্পিউটারে পাঠানো পাঠ্য পড়তে পারে। আজকাল
বিপরীতমুখী বক্তৃতা সংশ্লেষণ। পার্ট: 12 IoT, হোম অটোমেশন: 12 টি ধাপ (ছবি সহ)
")
বিপরীতমুখী বক্তৃতা সংশ্লেষণ। পার্ট: 12 আইওটি, হোম অটোমেশন: এই নিবন্ধটি হোম অটোমেশন ইন্সট্রাকটেবলের একটি সিরিজের 12 তম হল কিভাবে একটি আইওটি রেট্রো স্পিচ সিনথেসিস ডিভাইসকে একটি বিদ্যমান হোম অটোমেশন সিস্টেমে তৈরি করা এবং সংহত করা যায় যা সমস্ত প্রয়োজনীয় সফ্টওয়্যার কার্যকারিতা সহ টি
কোক মেশিন লেভেল ডিটেক্টর - এখন বক্তৃতা সহ!: 6 টি ধাপ (ছবি সহ)
")
কোক মেশিন লেভেল ডিটেক্টর-এখন বক্তৃতা দিয়ে! , এবং কথ্য শব্দের সংযোজন! আমি আমার প্রথম স্তরের ডিটেক্টর তৈরির পর, আমি একটি পাইজো বুজারকে জি -তে যুক্ত করেছি