![[vPython] স্পাইডার রোবট সিমুলেটর: Ste টি ধাপ](https://i.howwhatproduce.com/images/003/image-8663-22-j.webp "[vPython] স্পাইডার রোবট সিমুলেটর: Ste টি ধাপ")
সুচিপত্র:
- লেখক John Day day@howwhatproduce.com.
- Public 2024-01-30 08:02.
- সর্বশেষ পরিবর্তিত 2025-01-23 14:36.


আপনি যদি আমার নকশাটি আকর্ষণীয় মনে করেন তবে আপনি একটি ছোট অনুদান দিতে পারেন:
আমি আমার স্পাইডার রোবটের জন্য ক্রিয়াগুলি অনুকরণ করতে vPython ব্যবহার করছি। এটি পিসি/ম্যাকের মধ্যে আপনার নিজের আগ্রহের ক্রিয়াগুলি বিকাশ করা সহজ করবে এবং তারপরে পোর্ট থেকে আরডুইনোতে।
যদি আপনি এটিতে আগ্রহী হন তবে বাস্তব রোবট নির্দেশযোগ্য
www.instructables.com/id/DIY-Spider-RobotQu…
VPython হল পাইথন প্রোগ্রামিং ল্যাঙ্গুয়েজ এবং একটি 3D গ্রাফিক্স মডিউল যার নাম "ভিজ্যুয়াল" 2000 সালে ডেভিড শেরার দ্বারা উদ্ভূত। কারণ এটি পাইথনের উপর ভিত্তি করে, এটি অভিজ্ঞ প্রোগ্রামার এবং গবেষকদের জন্যও অনেক কিছু অফার করে।
ধাপ 1: VPython এবং সম্পাদক ইনস্টল করুন


পাইথন ইনস্টল করুন , আমি 2.7.x ব্যবহার করার পরামর্শ দিই
www.python.org/
এবং তারপর vpython
vpython.org/
এবং, আমার প্রিয় সম্পাদক - পাইচার্ম
www.jetbrains.com/pycharm/
ধাপ 2: কোডটি ডাউনলোড করুন এবং চালান

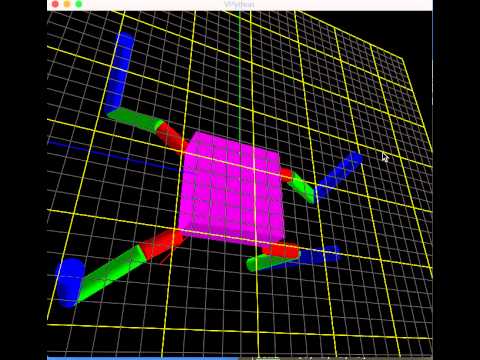
কোডটি ডাউনলোড করুন এবং এটি PyCharm দিয়ে খুলুন, কোডটি চালান এবং আপনি স্ক্রিনে একটি অভিনব 3D মাকড়সা রোবট দেখতে পাবেন এবং আপনি মাউসটি জুম ইন/আউট করার জন্য, ডান বোতামটি ঘোরানোর জন্য ব্যবহার করতে পারেন।
ধাপ 3: এই সিমুলেটরে আপনার ক্রিয়াগুলি বিকাশ করুন
আপনি যদি আরও আকর্ষণীয় ক্রিয়া বিকাশ করতে পারেন এবং আমার সাথে ভাগ করতে পারেন তবে এটি মজাদার হবে।
ধাপ 4: রিয়েল স্পাইডার রোবটের রিমোট কন্ট্রোল
কিভাবে পাইথন চিন্তা ব্লুটুথ দ্বারা বাস্তব রোবট নিয়ন্ত্রণ? আপনি ইতিমধ্যে উপায় চেষ্টা করতে পারেন। কারো দরকার হলে পরে পোস্ট করব।
প্রস্তাবিত:
DIY রেসিং গেম সিমুলেটর -- F1 সিমুলেটর: 5 টি ধাপ

DIY রেসিং গেম সিমুলেটর || F1 সিমুলেটর: হ্যালো সবাই আমার চ্যানেলে স্বাগতম, আজ আমি আপনাকে দেখাতে যাচ্ছি, কিভাবে আমি একটি " রেসিং গেম সিমুলেটর " Arduino UNO এর সাহায্যে। এটি একটি বিল্ড ব্লগ নয়, এটি শুধু সিমুলেটরটির ওভারভিউ এবং পরীক্ষা। সম্পূর্ণ বিল্ড ব্লগ শীঘ্রই আসছে
"মাইলস" চতুর্ভুজ স্পাইডার রোবট: 5 টি ধাপ

"মাইলস" চতুর্ভুজ স্পাইডার রোবট: আরডুইনো ন্যানোর উপর ভিত্তি করে, মাইলস হল একটি মাকড়সা রোবট যা তার 4 পা ব্যবহার করে হাঁটতে এবং কৌশলে। এটি 8 SG90 / MG90 Servo মোটরগুলিকে পায়ে অ্যাকচুয়েটর হিসেবে ব্যবহার করে, এতে একটি কাস্টম PCB থাকে যা servos কে পাওয়ার এবং কন্ট্রোল করার জন্য তৈরি করা হয় এবং Arduino Nano।
চতুর্ভুজ স্পাইডার রোবট - GC_MK1: 8 ধাপ (ছবি সহ)
")
চতুর্ভুজ মাকড়সা রোবট - GC_MK1: মাকড়সা রোবট ওরফে GC_MK1 এগিয়ে এবং পিছনে চলে যায় এবং Arduino এ লোড কোডের উপর নির্ভর করে নাচতেও পারে। রোবট 12 মাইক্রো সার্ভো মোটর (SG90) ব্যবহার করে; প্রতিটি পায়ের জন্য 3। সার্ভো মোটরগুলিকে নিয়ন্ত্রণ করতে ব্যবহৃত নিয়ামকটি হল একটি Arduino Nan
যে কোন পিসি সিমুলেটর (ক্লিয়ারভিউ আরসি সিমুলেটর) এর সাথে ফ্লাইস্কাই ট্রান্সমিটার কিভাবে সংযুক্ত করবেন -- কেবল ছাড়া: 6 টি ধাপ
 এর সাথে ফ্লাইস্কাই ট্রান্সমিটার কিভাবে সংযুক্ত করবেন -- কেবল ছাড়া: 6 টি ধাপ")
যে কোন পিসি সিমুলেটর (ক্লিয়ারভিউ আরসি সিমুলেটর) এর সাথে ফ্লাইস্কাই ট্রান্সমিটার কিভাবে সংযুক্ত করবেন || একটি কেবল ছাড়া: উইং বিমানের নতুনদের জন্য ফ্লাইট সিমুলেশন ফ্লাইট সিমুলেশন সংযোগের জন্য ফ্লাইস্কি আই 6 কে কম্পিউটারের সাথে সংযুক্ত করার নির্দেশিকা।
[DIY] স্পাইডার রোবট (কোয়াড রোবট, চতুর্ভুজ): 14 টি ধাপ (ছবি সহ)
![[DIY] স্পাইডার রোবট (কোয়াড রোবট, চতুর্ভুজ): 14 টি ধাপ (ছবি সহ)](https://i.howwhatproduce.com/images/001/image-1641-34-j.webp "[DIY] স্পাইডার রোবট (কোয়াড রোবট, চতুর্ভুজ): 14 টি ধাপ (ছবি সহ)")
[DIY] স্পাইডার রোবট (চতুর্ভুজ রোবট, চতুর্ভুজ): যদি আপনার আমার কাছ থেকে অতিরিক্ত সহায়তার প্রয়োজন হয়, তাহলে আমাকে কিছু উপযুক্ত অনুদান দেওয়া ভাল হবে: http: //paypal.me/RegisHsu2019-10-10 আপডেট: নতুন কম্পাইলার ভাসমান সংখ্যা গণনার সমস্যা সৃষ্টি করবে। আমি ইতিমধ্যে কোড সংশোধন করেছি। 2017-03-26